MTCNN
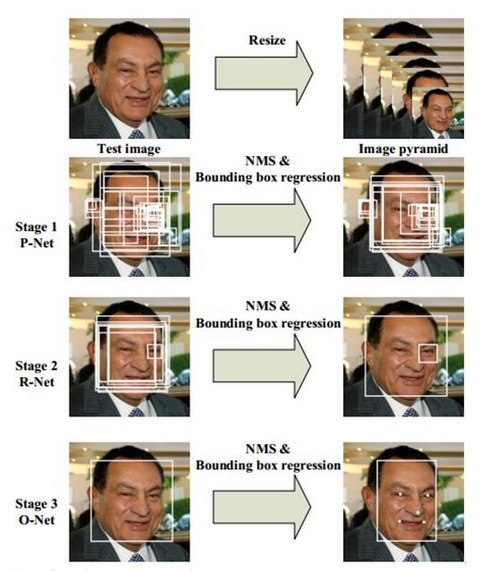
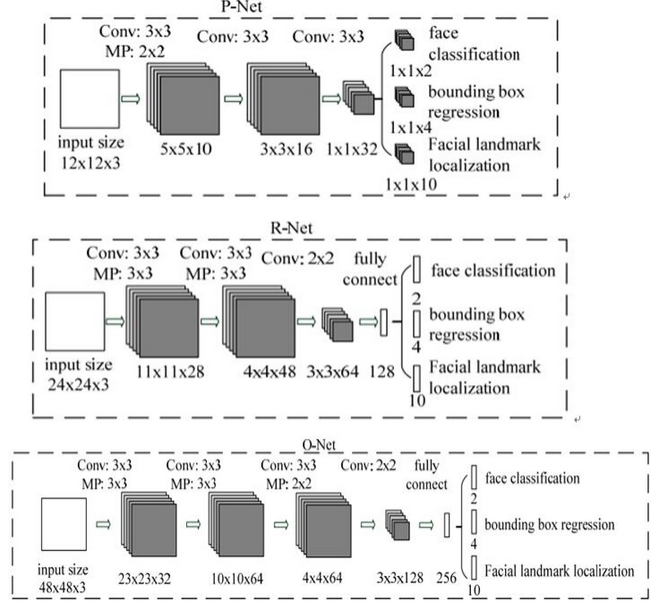
MTCNN算法由3个网络构成,分别是PNet,RNet以及ONet组成,其中PNet输出人脸位置和是人脸的概率,并且PNet是一个全卷积网络,在图像金字塔上不同尺度获得feature map每个pixel对应的人脸位置编码和人脸概率,然后通过阈值和NMS获得ROI人脸区域.第二个网络叫RNet主要对第一个网络获得的ROI区域进行refine,将第一个网络获得的所有ROI resize到24*24,重新分类获得所有ROI区域的人脸区域坐标和是人脸的概率。第三个网络叫ONet,对第二个CNN获得的人脸区域进行再次训练获得是否是人脸,人脸坐标以及五个特征点。
算法框架
测试图片

测试结果

以下项目时MTCNN的具体代码实现
项目地址:https://github.com/pangyupo/mxnet_mtcnn_face_detection
# coding: utf-8
# main.py
import mxnet as mx
from mtcnn_detector import MtcnnDetector
import cv2
import os
import time
detector = MtcnnDetector(model_folder='model', ctx=mx.cpu(0), num_worker = 4 , accurate_landmark = False)
img = cv2.imread('test.jpg')
for i in range(4):
t1 = time.time()
results = detector.detect_face(img)
print 'time: ',time.time() - t1
if results is not None:
total_boxes = results[0]
points = results[1]
draw = img.copy()
for b in total_boxes:
cv2.rectangle(draw, (int(b[0]), int(b[1])), (int(b[2]), int(b[3])), (100, 255, 0))
for p in points:
for i in range(5):
cv2.circle(draw, (p[i], p[i + 5]), 1, (0, 0, 255), 2)
cv2.imshow("detection result", draw)
cv2.waitKey(0)
path = os.path.join('resutl'+'.jpg')
cv2.imwrite(path,draw)
# --------------
# test on camera
# --------------
'''
camera = cv2.VideoCapture(0)
while True:
grab, frame = camera.read()
img = cv2.resize(frame, (320,180))
t1 = time.time()
results = detector.detect_face(img)
print 'time: ',time.time() - t1
if results is None:
continue
total_boxes = results[0]
points = results[1]
draw = img.copy()
for b in total_boxes:
cv2.rectangle(draw, (int(b[0]), int(b[1])), (int(b[2]), int(b[3])), (255, 255, 255))
for p in points:
for i in range(5):
cv2.circle(draw, (p[i], p[i + 5]), 1, (255, 0, 0), 2)
cv2.imshow("detection result", draw)
cv2.waitKey(30)'''# coding: utf-8
# mtcnn_detector.py
import os
import mxnet as mx
import numpy as np
import math
import cv2
from multiprocessing import Pool
from itertools import repeat
from itertools import izip
from helper import nms, adjust_input, generate_bbox, detect_first_stage_warpper
class MtcnnDetector(object):
"""
Joint Face Detection and Alignment using Multi-task Cascaded Convolutional Neural Networks
see https://github.com/kpzhang93/MTCNN_face_detection_alignment
this is a mxnet version"""
def __init__(self,
model_folder='.',
minsize = 20,
threshold = [0.6, 0.7, 0.7],
factor = 0.709,
num_worker = 1,
accurate_landmark = False,
ctx=mx.gpu()):"""
Initialize the detector
Parameters:
----------
model_folder : string
path for the models
minsize : float number
minimal face to detect
threshold : float number
detect threshold for 3 stages
factor: float number
scale factor for image pyramid
num_worker: int number
number of processes we use for first stage
accurate_landmark: bool
use accurate landmark localization or not
"""
self.num_worker = num_worker
self.accurate_landmark = accurate_landmark
# load 4 models from folder
models = ['det1', 'det2', 'det3','det4']
models = [ os.path.join(model_folder, f) for f in models]
self.PNets = []
for i in range(num_worker):
workner_net = mx.model.FeedForward.load(models[0], 1, ctx=ctx)
self.PNets.append(workner_net)
self.Pool = Pool(num_worker)
self.RNet = mx.model.FeedForward.load(models[1], 1, ctx=ctx)
self.ONet = mx.model.FeedForward.load(models[2], 1, ctx=ctx)
self.LNet = mx.model.FeedForward.load(models[3], 1, ctx=ctx)
self.minsize = float(minsize)
self.factor = float(factor)
self.threshold = threshold
def convert_to_square(self, bbox):
"""
convert bbox to square
Parameters:
----------
bbox: numpy array , shape n x 5
input bbox
Returns:
-------
square bbox
"""
square_bbox = bbox.copy()
h = bbox[:, 3] - bbox[:, 1] + 1
w = bbox[:, 2] - bbox[:, 0] + 1
max_side = np.maximum(h,w)
square_bbox[:, 0] = bbox[:, 0] + w*0.5 - max_side*0.5
square_bbox[:, 1] = bbox[:, 1] + h*0.5 - max_side*0.5
square_bbox[:, 2] = square_bbox[:, 0] + max_side - 1
square_bbox[:, 3] = square_bbox[:, 1] + max_side - 1
return square_bbox
def calibrate_box(self, bbox, reg):
"""
calibrate bboxes
Parameters:
----------
bbox: numpy array, shape n x 5
input bboxes
reg: numpy array, shape n x 4
bboxex adjustment
Returns:
-------
bboxes after refinement
"""
w = bbox[:, 2] - bbox[:, 0] + 1
w = np.expand_dims(w, 1)
h = bbox[:, 3] - bbox[:, 1] + 1
h = np.expand_dims(h, 1)
reg_m = np.hstack([w, h, w, h])
aug = reg_m * reg
bbox[:, 0:4] = bbox[:, 0:4] + aug
return bbox
def pad(self, bboxes, w, h):
"""
pad the the bboxes, alse restrict the size of it
Parameters:
----------
bboxes: numpy array, n x 5
input bboxes
w: float number
width of the input image
h: float number
height of the input image
Returns :
------s
dy, dx : numpy array, n x 1
start point of the bbox in target image
edy, edx : numpy array, n x 1
end point of the bbox in target image
y, x : numpy array, n x 1
start point of the bbox in original image
ex, ex : numpy array, n x 1
end point of the bbox in original image
tmph, tmpw: numpy array, n x 1
height and width of the bbox
"""
tmpw, tmph = bboxes[:, 2] - bboxes[:, 0] + 1, bboxes[:, 3] - bboxes[:, 1] + 1
num_box = bboxes.shape[0]
dx , dy= np.zeros((num_box, )), np.zeros((num_box, ))
edx, edy = tmpw.copy()-1, tmph.copy()-1
x, y, ex, ey = bboxes[:, 0], bboxes[:, 1], bboxes[:, 2], bboxes[:, 3]
tmp_index = np.where(ex > w-1)
edx[tmp_index] = tmpw[tmp_index] + w - 2 - ex[tmp_index]
ex[tmp_index] = w - 1
tmp_index = np.where(ey > h-1)
edy[tmp_index] = tmph[tmp_index] + h - 2 - ey[tmp_index]
ey[tmp_index] = h - 1
tmp_index = np.where(x < 0)
dx[tmp_index] = 0 - x[tmp_index]
x[tmp_index] = 0
tmp_index = np.where(y < 0)
dy[tmp_index] = 0 - y[tmp_index]
y[tmp_index] = 0
return_list = [dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph]
return_list = [item.astype(np.int32) for item in return_list]
return return_list
def slice_index(self, number):
"""
slice the index into (n,n,m), m < n
Parameters:
----------
number: int number
number"""
def chunks(l, n):"""Yield successive n-sized chunks from l."""
for i in range(0, len(l), n):
yield l[i:i + n]
num_list = range(number)
return list(chunks(num_list, self.num_worker))
def detect_face(self, img):
"""
detect face over img
Parameters:
----------
img: numpy array, bgr order of shape (1, 3, n, m)
input image
Retures:
-------
bboxes: numpy array, n x 5 (x1,y2,x2,y2,score)
bboxes
points: numpy array, n x 10 (x1, x2 ... x5, y1, y2 ..y5)
landmarks"""
# check input
MIN_DET_SIZE = 12
if img is None:
return None
# only works for color image
if len(img.shape) != 3:
return None
# detected boxes
total_boxes = []
height, width, _ = img.shape
minl = min( height, width)
# get all the valid scales
scales = []
m = MIN_DET_SIZE/self.minsize
minl *= m
factor_count = 0
while minl > MIN_DET_SIZE:
scales.append(m*self.factor**factor_count)
minl *= self.factor
factor_count += 1
#############################################
# first stage
#############################################
#for scale in scales:
# return_boxes = self.detect_first_stage(img, scale, 0)
# if return_boxes is not None:
# total_boxes.append(return_boxes)
sliced_index = self.slice_index(len(scales))
total_boxes = []
for batch in sliced_index:
local_boxes = self.Pool.map( detect_first_stage_warpper, \
izip(repeat(img), self.PNets[:len(batch)], [scales[i] for i in batch], repeat(self.threshold[0])) )
total_boxes.extend(local_boxes)
# remove the Nones
total_boxes = [ i for i in total_boxes if i is not None]
if len(total_boxes) == 0:
return None
total_boxes = np.vstack(total_boxes)
if total_boxes.size == 0:
return None
# merge the detection from first stage
pick = nms(total_boxes[:, 0:5], 0.7, 'Union')
total_boxes = total_boxes[pick]
bbw = total_boxes[:, 2] - total_boxes[:, 0] + 1
bbh = total_boxes[:, 3] - total_boxes[:, 1] + 1
# refine the bboxes
total_boxes = np.vstack([total_boxes[:, 0]+total_boxes[:, 5] * bbw,
total_boxes[:, 1]+total_boxes[:, 6] * bbh,
total_boxes[:, 2]+total_boxes[:, 7] * bbw,
total_boxes[:, 3]+total_boxes[:, 8] * bbh,
total_boxes[:, 4]
])
total_boxes = total_boxes.T
total_boxes = self.convert_to_square(total_boxes)
total_boxes[:, 0:4] = np.round(total_boxes[:, 0:4])
#############################################
# second stage
#############################################
num_box = total_boxes.shape[0]
# pad the bbox
[dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph] = self.pad(total_boxes, width, height)
# (3, 24, 24) is the input shape for RNet
input_buf = np.zeros((num_box, 3, 24, 24), dtype=np.float32)
for i in range(num_box):
tmp = np.zeros((tmph[i], tmpw[i], 3), dtype=np.uint8)
tmp[dy[i]:edy[i]+1, dx[i]:edx[i]+1, :] = img[y[i]:ey[i]+1, x[i]:ex[i]+1, :]
input_buf[i, :, :, :] = adjust_input(cv2.resize(tmp, (24, 24)))
output = self.RNet.predict(input_buf)
# filter the total_boxes with threshold
passed = np.where(output[1][:, 1] > self.threshold[1])
total_boxes = total_boxes[passed]
if total_boxes.size == 0:
return None
total_boxes[:, 4] = output[1][passed, 1].reshape((-1,))
reg = output[0][passed]
# nms
pick = nms(total_boxes, 0.7, 'Union')
total_boxes = total_boxes[pick]
total_boxes = self.calibrate_box(total_boxes, reg[pick])
total_boxes = self.convert_to_square(total_boxes)
total_boxes[:, 0:4] = np.round(total_boxes[:, 0:4])
#############################################
# third stage
#############################################
num_box = total_boxes.shape[0]
# pad the bbox
[dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph] = self.pad(total_boxes, width, height)
# (3, 48, 48) is the input shape for ONet
input_buf = np.zeros((num_box, 3, 48, 48), dtype=np.float32)
for i in range(num_box):
tmp = np.zeros((tmph[i], tmpw[i], 3), dtype=np.float32)
tmp[dy[i]:edy[i]+1, dx[i]:edx[i]+1, :] = img[y[i]:ey[i]+1, x[i]:ex[i]+1, :]
input_buf[i, :, :, :] = adjust_input(cv2.resize(tmp, (48, 48)))
output = self.ONet.predict(input_buf)
# filter the total_boxes with threshold
passed = np.where(output[2][:, 1] > self.threshold[2])
total_boxes = total_boxes[passed]
if total_boxes.size == 0:
return None
total_boxes[:, 4] = output[2][passed, 1].reshape((-1,))
reg = output[1][passed]
points = output[0][passed]
# compute landmark points
bbw = total_boxes[:, 2] - total_boxes[:, 0] + 1
bbh = total_boxes[:, 3] - total_boxes[:, 1] + 1
points[:, 0:5] = np.expand_dims(total_boxes[:, 0], 1) + np.expand_dims(bbw, 1) * points[:, 0:5]
points[:, 5:10] = np.expand_dims(total_boxes[:, 1], 1) + np.expand_dims(bbh, 1) * points[:, 5:10]
# nms
total_boxes = self.calibrate_box(total_boxes, reg)
pick = nms(total_boxes, 0.7, 'Min')
total_boxes = total_boxes[pick]
points = points[pick]
if not self.accurate_landmark:
return total_boxes, points
#############################################
# extended stage
#############################################
num_box = total_boxes.shape[0]
patchw = np.maximum(total_boxes[:, 2]-total_boxes[:, 0]+1, total_boxes[:, 3]-total_boxes[:, 1]+1)
patchw = np.round(patchw*0.25)
# make it even
patchw[np.where(np.mod(patchw,2) == 1)] += 1
input_buf = np.zeros((num_box, 15, 24, 24), dtype=np.float32)
for i in range(5):
x, y = points[:, i], points[:, i+5]
x, y = np.round(x-0.5*patchw), np.round(y-0.5*patchw)
[dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph] = self.pad(np.vstack([x, y, x+patchw-1, y+patchw-1]).T,
width,
height)
for j in range(num_box):
tmpim = np.zeros((tmpw[j], tmpw[j], 3), dtype=np.float32)
tmpim[dy[j]:edy[j]+1, dx[j]:edx[j]+1, :] = img[y[j]:ey[j]+1, x[j]:ex[j]+1, :]
input_buf[j, i*3:i*3+3, :, :] = adjust_input(cv2.resize(tmpim, (24, 24)))
output = self.LNet.predict(input_buf)
pointx = np.zeros((num_box, 5))
pointy = np.zeros((num_box, 5))
for k in range(5):
# do not make a large movement
tmp_index = np.where(np.abs(output[k]-0.5) > 0.35)
output[k][tmp_index[0]] = 0.5
pointx[:, k] = np.round(points[:, k] - 0.5*patchw) + output[k][:, 0]*patchw
pointy[:, k] = np.round(points[:, k+5] - 0.5*patchw) + output[k][:, 1]*patchw
points = np.hstack([pointx, pointy])
points = points.astype(np.int32)
return total_boxes, points
# coding: utf-8
# helper.py
import math
import cv2
import numpy as np
def nms(boxes, overlap_threshold, mode='Union'):"""
non max suppression
Parameters:
----------
box: numpy array n x 5
input bbox array
overlap_threshold: float number
threshold of overlap
mode: float number
how to compute overlap ratio, 'Union' or 'Min'
Returns:
-------
index array of the selected bbox"""
# if there are no boxes, return an empty list
if len(boxes) == 0:
return []
# if the bounding boxes integers, convert them to floats
if boxes.dtype.kind == "i":
boxes = boxes.astype("float")
# initialize the list of picked indexes
pick = []
# grab the coordinates of the bounding boxes
x1, y1, x2, y2, score = [boxes[:, i] for i in range(5)]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
idxs = np.argsort(score)
# keep looping while some indexes still remain in the indexes list
while len(idxs) > 0:
# grab the last index in the indexes list and add the index value to the list of picked indexes
last = len(idxs) - 1
i = idxs[last]
pick.append(i)
xx1 = np.maximum(x1[i], x1[idxs[:last]])
yy1 = np.maximum(y1[i], y1[idxs[:last]])
xx2 = np.minimum(x2[i], x2[idxs[:last]])
yy2 = np.minimum(y2[i], y2[idxs[:last]])
# compute the width and height of the bounding box
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
inter = w * h
if mode == 'Min':
overlap = inter / np.minimum(area[i], area[idxs[:last]])
else:
overlap = inter / (area[i] + area[idxs[:last]] - inter)
# delete all indexes from the index list that have
idxs = np.delete(idxs, np.concatenate(([last],
np.where(overlap > overlap_threshold)[0])))
return pick
def adjust_input(in_data):
"""
adjust the input from (h, w, c) to ( 1, c, h, w) for network input
Parameters:
----------
in_data: numpy array of shape (h, w, c)
input data
Returns:
-------
out_data: numpy array of shape (1, c, h, w)
reshaped array
"""
if in_data.dtype is not np.dtype('float32'):
out_data = in_data.astype(np.float32)
else:
out_data = in_data
out_data = out_data.transpose((2,0,1))
out_data = np.expand_dims(out_data, 0)
out_data = (out_data - 127.5)*0.0078125
return out_data
def generate_bbox(map, reg, scale, threshold):
"""
generate bbox from feature map
Parameters:
----------
map: numpy array , n x m x 1
detect score for each position
reg: numpy array , n x m x 4
bbox
scale: float number
scale of this detection
threshold: float number
detect threshold
Returns:
-------
bbox array"""
stride = 2
cellsize = 12
t_index = np.where(map>threshold)
# find nothing
if t_index[0].size == 0:
return np.array([])
dx1, dy1, dx2, dy2 = [reg[0, i, t_index[0], t_index[1]] for i in range(4)]
reg = np.array([dx1, dy1, dx2, dy2])
score = map[t_index[0], t_index[1]]
boundingbox = np.vstack([np.round((stride*t_index[1]+1)/scale),
np.round((stride*t_index[0]+1)/scale),
np.round((stride*t_index[1]+1+cellsize)/scale),
np.round((stride*t_index[0]+1+cellsize)/scale),
score,
reg])
return boundingbox.T
def detect_first_stage(img, net, scale, threshold):
"""
run PNet for first stage
Parameters:
----------
img: numpy array, bgr order
input image
scale: float number
how much should the input image scale
net: PNet
worker
Returns:
-------
total_boxes : bboxes"""
height, width, _ = img.shape
hs = int(math.ceil(height * scale))
ws = int(math.ceil(width * scale))
im_data = cv2.resize(img, (ws,hs))
# adjust for the network input
input_buf = adjust_input(im_data)
output = net.predict(input_buf)
boxes = generate_bbox(output[1][0,1,:,:], output[0], scale, threshold)
if boxes.size == 0:
return None
# nms
pick = nms(boxes[:,0:5], 0.5, mode='Union')
boxes = boxes[pick]
return boxes
def detect_first_stage_warpper( args ):
return detect_first_stage(*args)
caffe的实现版本
_init_paths.py
import os.path as osp
import sys
def add_path(path):
if path not in sys.path:
sys.path.insert(0, path)
caffe_path = '/home/zou/caffe'
# Add caffe to PYTHONPATH
caffe_path = osp.join(caffe_path, 'python')
add_path(caffe_path)demo.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import _init_paths
import caffe
import cv2
import numpy as np
def bbreg(boundingbox, reg):
reg = reg.T
# calibrate bouding boxes
if reg.shape[1] == 1:
pass # reshape of reg
w = boundingbox[:,2] - boundingbox[:,0] + 1
h = boundingbox[:,3] - boundingbox[:,1] + 1
bb0 = boundingbox[:,0] + reg[:,0]*w
bb1 = boundingbox[:,1] + reg[:,1]*h
bb2 = boundingbox[:,2] + reg[:,2]*w
bb3 = boundingbox[:,3] + reg[:,3]*h
boundingbox[:,0:4] = np.array([bb0, bb1, bb2, bb3]).T
#print "bb", boundingbox
return boundingbox
def pad(boxesA, w, h):
boxes = boxesA.copy() # shit, value parameter!!!
tmph = boxes[:,3] - boxes[:,1] + 1
tmpw = boxes[:,2] - boxes[:,0] + 1
numbox = boxes.shape[0]
dx = np.ones(numbox)
dy = np.ones(numbox)
edx = tmpw
edy = tmph
x = boxes[:,0:1][:,0]
y = boxes[:,1:2][:,0]
ex = boxes[:,2:3][:,0]
ey = boxes[:,3:4][:,0]
tmp = np.where(ex > w)[0]
if tmp.shape[0] != 0:
edx[tmp] = -ex[tmp] + w-1 + tmpw[tmp]
ex[tmp] = w-1
tmp = np.where(ey > h)[0]
if tmp.shape[0] != 0:
edy[tmp] = -ey[tmp] + h-1 + tmph[tmp]
ey[tmp] = h-1
tmp = np.where(x < 1)[0]
if tmp.shape[0] != 0:
dx[tmp] = 2 - x[tmp]
x[tmp] = np.ones_like(x[tmp])
tmp = np.where(y < 1)[0]
if tmp.shape[0] != 0:
dy[tmp] = 2 - y[tmp]
y[tmp] = np.ones_like(y[tmp])
# for python index from 0, while matlab from 1
dy = np.maximum(0, dy-1)
dx = np.maximum(0, dx-1)
y = np.maximum(0, y-1)
x = np.maximum(0, x-1)
edy = np.maximum(0, edy-1)
edx = np.maximum(0, edx-1)
ey = np.maximum(0, ey-1)
ex = np.maximum(0, ex-1)
#print 'boxes', boxes
return [dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph]
def rerec(bboxA):
# convert bboxA to square
w = bboxA[:,2] - bboxA[:,0]
h = bboxA[:,3] - bboxA[:,1]
l = np.maximum(w,h).T
bboxA[:,0] = bboxA[:,0] + w*0.5 - l*0.5
bboxA[:,1] = bboxA[:,1] + h*0.5 - l*0.5
bboxA[:,2:4] = bboxA[:,0:2] + np.repeat([l], 2, axis = 0).T
return bboxA
def nms(boxes, threshold, type):
"""nms
:boxes: [:,0:5]
:threshold: 0.5 like
:type: 'Min' or others
:returns: TODO"""
if boxes.shape[0] == 0:
return np.array([])
x1 = boxes[:,0]
y1 = boxes[:,1]
x2 = boxes[:,2]
y2 = boxes[:,3]
s = boxes[:,4]
area = np.multiply(x2-x1+1, y2-y1+1)
I = np.array(s.argsort()) # read s using I
pick = [];
while len(I) > 0:
xx1 = np.maximum(x1[I[-1]], x1[I[0:-1]])
yy1 = np.maximum(y1[I[-1]], y1[I[0:-1]])
xx2 = np.minimum(x2[I[-1]], x2[I[0:-1]])
yy2 = np.minimum(y2[I[-1]], y2[I[0:-1]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
if type == 'Min':
o = inter / np.minimum(area[I[-1]], area[I[0:-1]])
else:
o = inter / (area[I[-1]] + area[I[0:-1]] - inter)
pick.append(I[-1])
I = I[np.where( o <= threshold)[0]]
return pick
def generateBoundingBox(map, reg, scale, t):
stride = 2
cellsize = 12
map = map.T
dx1 = reg[0,:,:].T
dy1 = reg[1,:,:].T
dx2 = reg[2,:,:].T
dy2 = reg[3,:,:].T
(x, y) = np.where(map >= t)
yy = y
xx = x
'''
if y.shape[0] == 1: # only one point exceed threshold
y = y.T
x = x.T
score = map[x,y].T
dx1 = dx1.T
dy1 = dy1.T
dx2 = dx2.T
dy2 = dy2.T
# a little stange, when there is only one bb created by PNet
#print "1: x,y", x,y
a = (x*map.shape[1]) + (y+1)
x = a/map.shape[0]
y = a%map.shape[0] - 1
#print "2: x,y", x,y
else:
score = map[x,y]'''
score = map[x,y]
reg = np.array([dx1[x,y], dy1[x,y], dx2[x,y], dy2[x,y]])
if reg.shape[0] == 0:
pass
boundingbox = np.array([yy, xx]).T
bb1 = np.fix((stride * (boundingbox) + 1) / scale).T # matlab index from 1, so with "boundingbox-1"
bb2 = np.fix((stride * (boundingbox) + cellsize - 1 + 1) / scale).T # while python don't have to
score = np.array([score])
boundingbox_out = np.concatenate((bb1, bb2, score, reg), axis=0)
return boundingbox_out.T
def drawBoxes(im, boxes):
x1 = boxes[:,0]
y1 = boxes[:,1]
x2 = boxes[:,2]
y2 = boxes[:,3]
for i in range(x1.shape[0]):
cv2.rectangle(im, (int(x1[i]), int(y1[i])), (int(x2[i]), int(y2[i])), (0,255,0), 1)
return im
def drawPoints(im,points):
for i in range(points.shape[0]):
left_eye = (int(points[i][0]),int(points[i][5]))
cv2.circle(im, left_eye,2, (0,0,255), 2)
right_eye = (int(points[i][1]),int(points[i][6]))
cv2.circle(im, right_eye,2, (0,0,255), 2)
nose = (int(points[i][2]),int(points[i][7]))
cv2.circle(im, nose,2, (0,0,255), 2)
left_mouth = (int(points[i][3]),int(points[i][8]))
cv2.circle(im, left_mouth,2, (0,0,255), 2)
right_mouth = (int(points[i][4]),int(points[i][9]))
cv2.circle(im, right_mouth,2, (0,0,255), 2)
return im
def drawPatch(im,points):
for i in range(points.shape[0]):
left_eye = (int(points[i][0]),int(points[i][5]))
right_eye = (int(points[i][1]),int(points[i][6]))
nose = (int(points[i][2]),int(points[i][7]))
left_mouth = (int(points[i][3]),int(points[i][8]))
right_mouth = (int(points[i][4]),int(points[i][9]))
eye_length = np.sqrt((left_eye[0]-right_eye[0])*(left_eye[0]-right_eye[0])+(left_eye[1]-right_eye[1])*(left_eye[1]-right_eye[1]))
mouth_length = np.sqrt((left_mouth[0]-right_mouth[0])*(left_mouth[0]-right_mouth[0])+(left_mouth[1]-right_mouth[1])*(left_mouth[1]-right_mouth[1]))
t11_x = left_eye[0]
t11_y = left_eye[1] - 0.8*eye_length
t12_x = left_eye[0] + eye_length
t12_y = left_eye[1] - 0.4*eye_length
cv2.rectangle(im, (int(t11_x), int(t11_y)), (int(t12_x), int(t12_y)), (0,255,0), 1)
t21_x = (left_eye[0] + right_eye[0])/2 - 0.15*eye_length
t21_y = (left_eye[1] + right_eye[1])/2 - 0.3*eye_length
t22_x = (left_eye[0] + right_eye[0])/2 + 0.15*eye_length
t22_y = (left_eye[1] + right_eye[1])/2
cv2.rectangle(im, (int(t21_x), int(t21_y)), (int(t22_x), int(t22_y)), (0,255,0), 1)
t31_x = (left_eye[0] +nose[0])/2-0.1*eye_length
t31_y = ((left_eye[1] + right_eye[1])/2 + nose[1])/2 - 0.1*eye_length
t32_x = (left_eye[0] +nose[0])/2+0.1*eye_length
t32_y = ((left_eye[1] + right_eye[1])/2 + nose[1])/2 + 0.1*eye_length
cv2.rectangle(im, (int(t31_x), int(t31_y)), (int(t32_x), int(t32_y)), (0,255,0), 1)
t41_x = (right_eye[0] +nose[0])/2-0.1*eye_length
t41_y = ((left_eye[1] + right_eye[1])/2 + nose[1])/2 - 0.1*eye_length
t42_x = (right_eye[0] +nose[0])/2+0.1*eye_length
t42_y = ((left_eye[1] + right_eye[1])/2 + nose[1])/2 + 0.1*eye_length
cv2.rectangle(im, (int(t41_x), int(t41_y)), (int(t42_x), int(t42_y)), (0,255,0), 1)
t51_x = nose[0]-0.1*eye_length
t51_y = nose[1]-0.1*eye_length
t52_x = nose[0]+0.1*eye_length
t52_y = nose[1]+0.1*eye_length
cv2.rectangle(im, (int(t51_x), int(t51_y)), (int(t52_x), int(t52_y)), (0,255,0), 1)
t61_x = nose[0]-0.1*eye_length
t61_y = nose[1]+0.2*eye_length
t62_x = nose[0]+0.1*eye_length
t62_y = nose[1]+0.4*eye_length
cv2.rectangle(im, (int(t61_x), int(t61_y)), (int(t62_x), int(t62_y)), (0,255,0), 1)
t71_x = left_mouth[0] - 0.7*mouth_length
t71_y = left_mouth[1] - mouth_length
t72_x = left_mouth[0]
t72_y = left_mouth[1]
cv2.rectangle(im, (int(t71_x), int(t71_y)), (int(t72_x), int(t72_y)), (0,255,0), 1)
t81_x = right_mouth[0]
t81_y = right_mouth[1] - mouth_length
t82_x = right_mouth[0] + 0.7*mouth_length
t82_y = left_mouth[1]
cv2.rectangle(im, (int(t81_x), int(t81_y)), (int(t82_x), int(t82_y)), (0,255,0), 1)
return im
from time import time
_tstart_stack = []
def tic():
_tstart_stack.append(time())
def toc(fmt="Elapsed: %s s"):
print fmt % (time()-_tstart_stack.pop())
def detect_face(img, minsize, PNet, RNet, ONet, threshold, fastresize, factor):
img2 = img.copy()
factor_count = 0
total_boxes = np.zeros((0,9), np.float)
points = []
h = img.shape[0]
w = img.shape[1]
minl = min(h, w)
img = img.astype(float)
m = 12.0/minsize
minl = minl*m
# create scale pyramid
scales = []
while minl >= 12:
scales.append(m * pow(factor, factor_count))
minl *= factor
factor_count += 1
# first stage
for scale in scales:
hs = int(np.ceil(h*scale))
ws = int(np.ceil(w*scale))
if fastresize:
im_data = (img-127.5)*0.0078125 # [0,255] -> [-1,1]
im_data = cv2.resize(im_data, (ws,hs)) # default is bilinear
else:
im_data = cv2.resize(img, (ws,hs)) # default is bilinear
im_data = (im_data-127.5)*0.0078125 # [0,255] -> [-1,1]
im_data = np.swapaxes(im_data, 0, 2)
im_data = np.array([im_data], dtype = np.float)
PNet.blobs['data'].reshape(1, 3, ws, hs)
PNet.blobs['data'].data[...] = im_data
out = PNet.forward()
boxes = generateBoundingBox(out['prob1'][0,1,:,:], out['conv4-2'][0], scale, threshold[0])
if boxes.shape[0] != 0:
pick = nms(boxes, 0.5, 'Union')
if len(pick) > 0 :
boxes = boxes[pick, :]
if boxes.shape[0] != 0:
total_boxes = np.concatenate((total_boxes, boxes), axis=0)
#####
# 1 #
#####
numbox = total_boxes.shape[0]
if numbox > 0:
# nms
pick = nms(total_boxes, 0.7, 'Union')
total_boxes = total_boxes[pick, :]
# revise and convert to square
regh = total_boxes[:,3] - total_boxes[:,1]
regw = total_boxes[:,2] - total_boxes[:,0]
t1 = total_boxes[:,0] + total_boxes[:,5]*regw
t2 = total_boxes[:,1] + total_boxes[:,6]*regh
t3 = total_boxes[:,2] + total_boxes[:,7]*regw
t4 = total_boxes[:,3] + total_boxes[:,8]*regh
t5 = total_boxes[:,4]
total_boxes = np.array([t1,t2,t3,t4,t5]).T
total_boxes = rerec(total_boxes) # convert box to square
total_boxes[:,0:4] = np.fix(total_boxes[:,0:4])
[dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph] = pad(total_boxes, w, h)
#print total_boxes.shape
#print total_boxes
numbox = total_boxes.shape[0]
if numbox > 0:
# second stage
# construct input for RNet
tempimg = np.zeros((numbox, 24, 24, 3)) # (24, 24, 3, numbox)
for k in range(numbox):
tmp = np.zeros((tmph[k], tmpw[k],3))
tmp[dy[k]:edy[k]+1, dx[k]:edx[k]+1] = img[y[k]:ey[k]+1, x[k]:ex[k]+1]
tempimg[k,:,:,:] = cv2.resize(tmp, (24, 24))
tempimg = (tempimg-127.5)*0.0078125 # done in imResample function wrapped by python
# RNet
tempimg = np.swapaxes(tempimg, 1, 3)
RNet.blobs['data'].reshape(numbox, 3, 24, 24)
RNet.blobs['data'].data[...] = tempimg
out = RNet.forward()
score = out['prob1'][:,1]
pass_t = np.where(score>threshold[1])[0]
score = np.array([score[pass_t]]).T
total_boxes = np.concatenate( (total_boxes[pass_t, 0:4], score), axis = 1)
mv = out['conv5-2'][pass_t, :].T
if total_boxes.shape[0] > 0:
pick = nms(total_boxes, 0.7, 'Union')
if len(pick) > 0 :
total_boxes = total_boxes[pick, :]
total_boxes = bbreg(total_boxes, mv[:, pick])
total_boxes = rerec(total_boxes)
#####
# 2 #
#####
numbox = total_boxes.shape[0]
if numbox > 0:
# third stage
total_boxes = np.fix(total_boxes)
[dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph] = pad(total_boxes, w, h)
tempimg = np.zeros((numbox, 48, 48, 3))
for k in range(numbox):
tmp = np.zeros((tmph[k], tmpw[k],3))
tmp[dy[k]:edy[k]+1, dx[k]:edx[k]+1] = img[y[k]:ey[k]+1, x[k]:ex[k]+1]
tempimg[k,:,:,:] = cv2.resize(tmp, (48, 48))
tempimg = (tempimg-127.5)*0.0078125 # [0,255] -> [-1,1]
# ONet
tempimg = np.swapaxes(tempimg, 1, 3)
ONet.blobs['data'].reshape(numbox, 3, 48, 48)
ONet.blobs['data'].data[...] = tempimg
out = ONet.forward()
score = out['prob1'][:,1]
points = out['conv6-3']
pass_t = np.where(score>threshold[2])[0]
points = points[pass_t, :]
score = np.array([score[pass_t]]).T
total_boxes = np.concatenate( (total_boxes[pass_t, 0:4], score), axis=1)
mv = out['conv6-2'][pass_t, :].T
w = total_boxes[:,3] - total_boxes[:,1] + 1
h = total_boxes[:,2] - total_boxes[:,0] + 1
points[:, 0:5] = np.tile(w, (5,1)).T * points[:, 0:5] + np.tile(total_boxes[:,0], (5,1)).T - 1
points[:, 5:10] = np.tile(h, (5,1)).T * points[:, 5:10] + np.tile(total_boxes[:,1], (5,1)).T -1
if total_boxes.shape[0] > 0:
total_boxes = bbreg(total_boxes, mv[:,:])
pick = nms(total_boxes, 0.7, 'Min')
if len(pick) > 0 :
total_boxes = total_boxes[pick, :]
points = points[pick, :]
#####
# 3 #
#####
return total_boxes, points
def initFaceDetector():
minsize = 20
caffe_model_path = "/home/duino/iactive/mtcnn/model"
threshold = [0.6, 0.7, 0.7]
factor = 0.709
caffe.set_mode_cpu()
PNet = caffe.Net(caffe_model_path+"/det1.prototxt", caffe_model_path+"/det1.caffemodel", caffe.TEST)
RNet = caffe.Net(caffe_model_path+"/det2.prototxt", caffe_model_path+"/det2.caffemodel", caffe.TEST)
ONet = caffe.Net(caffe_model_path+"/det3.prototxt", caffe_model_path+"/det3.caffemodel", caffe.TEST)
return (minsize, PNet, RNet, ONet, threshold, factor)
def haveFace(img, facedetector):
minsize = facedetector[0]
PNet = facedetector[1]
RNet = facedetector[2]
ONet = facedetector[3]
threshold = facedetector[4]
factor = facedetector[5]
if max(img.shape[0], img.shape[1]) < minsize:
return False, []
img_matlab = img.copy()
tmp = img_matlab[:,:,2].copy()
img_matlab[:,:,2] = img_matlab[:,:,0]
img_matlab[:,:,0] = tmp
#tic()
boundingboxes, points = detect_face(img_matlab, minsize, PNet, RNet, ONet, threshold, False, factor)
#toc()
containFace = (True, False)[boundingboxes.shape[0]==0]
return containFace, boundingboxes
def main():
minsize = 50
caffe_model_path = "/home/zou/mtcnn/model"
threshold = [0.6, 0.7, 0.7]
factor = 0.709
caffe.set_mode_gpu()
PNet = caffe.Net(caffe_model_path+"/det1.prototxt", caffe_model_path+"/det1.caffemodel", caffe.TEST)
RNet = caffe.Net(caffe_model_path+"/det2.prototxt", caffe_model_path+"/det2.caffemodel", caffe.TEST)
ONet = caffe.Net(caffe_model_path+"/det3.prototxt", caffe_model_path+"/det3.caffemodel", caffe.TEST)
camera = cv2.VideoCapture(0)
while True:
_, img = camera.read()
h,w = img.shape[:2]
if h>=w:
w = int(w/(h/500.0))
h = 500;
else:
h = int(h/(w/500.0))
w = 500
img = cv2.resize(img,(w,h))
img_matlab = img.copy()
tmp = img_matlab[:,:,2].copy()
img_matlab[:,:,2] = img_matlab[:,:,0]
img_matlab[:,:,0] = tmp
# check rgb position
tic()
boundingboxes, points = detect_face(img_matlab, minsize, PNet, RNet, ONet, threshold, False, factor)
toc()
if (len(boundingboxes)>0)&1:
img = drawBoxes(img, boundingboxes)
img = drawPoints(img, points)
if (len(boundingboxes)>0)&0:
img = drawBoxes(img, boundingboxes)
img = drawPatch(img, points)
cv2.imshow('img', img)
ch = cv2.waitKey(1)
if ch == 27:
break
#if boundingboxes.shape[0] > 0:
# error.append[imgpath]
#print error
if __name__ == "__main__":
main()C++实现
stdafx.h
// stdafx.h : 标准系统包含文件的包含文件,
// 或是经常使用但不常更改的
// 特定于项目的包含文件
//
#pragma once
#include "targetver.h"
#include <stdio.h>
#include <tchar.h>
#include <caffe/caffe.hpp>
#ifdef USE_OPENCV
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/videoio.hpp>
#endif // USE_OPENCV
#include <algorithm>
#include <iosfwd>
#include <memory>
#include <string>
#include <utility>
#include <vector>
#ifdef WITH_PYTHON_LAYER
#include <boost/python.hpp>
#endif
#include <string>
#include <vector>
#include "caffe/layer.hpp"
#include "caffe/layer_factory.hpp"
#include "caffe/layers/input_layer.hpp"
#include "caffe/layers/inner_product_layer.hpp"
#include "caffe/layers/prelu_layer.hpp"
#include "caffe/layers/conv_layer.hpp"
#include "caffe/layers/pooling_layer.hpp"
#include "caffe/layers/softmax_layer.hpp"
#include "caffe/layers/memory_data_layer.hpp"
#include "caffe/layers/dropout_layer.hpp"
#include "caffe/proto/caffe.pb.h"
#ifdef USE_CUDNN
#include "caffe/layers/cudnn_conv_layer.hpp"
#include "caffe/layers/cudnn_pooling_layer.hpp"
#include "caffe/layers/cudnn_relu_layer.hpp"
#include "caffe/layers/cudnn_softmax_layer.hpp"
#endif
#ifdef WITH_PYTHON_LAYER
#include "caffe/layers/python_layer.hpp"
#endif
using namespace caffe; // NOLINT(build/namespaces)
extern INSTANTIATE_CLASS(InputLayer);
extern INSTANTIATE_CLASS(InnerProductLayer);
extern INSTANTIATE_CLASS(ConvolutionLayer);
extern INSTANTIATE_CLASS(PReLULayer);
extern INSTANTIATE_CLASS(PoolingLayer);
extern INSTANTIATE_CLASS(SoftmaxLayer);
extern INSTANTIATE_CLASS(MemoryDataLayer);
extern INSTANTIATE_CLASS(DropoutLayer);
// TODO: 在此处引用程序需要的其他头文件MTCNN.cpp
// MTCNN_VS2015.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
// c++
#include <string>
#include <vector>
// boost
#include "boost/make_shared.hpp"
//#define CPU_ONLY
using namespace caffe;
#define FROM_VIDEO 1
string resultdir = "result";
typedef struct FaceRect {
float x1;
float y1;
float x2;
float y2;
float score; /**< Larger score should mean higher confidence. */
} FaceRect;
typedef struct FacePts {
float x[5], y[5];
} FacePts;
typedef struct FaceInfo {
FaceRect bbox;
cv::Vec4f regression;
FacePts facePts;
double roll;
double pitch;
double yaw;
} FaceInfo;
template<typename Dtype>
Dtype max(Dtype x, Dtype y)
{
return x>=y ? x : y;
}
template<typename Dtype>
Dtype min(Dtype x, Dtype y)
{
return x < y ? x : y;
}
class MTCNN {
public:
MTCNN(const string& proto_model_dir);
void Detect(const cv::Mat& img, std::vector<FaceInfo> &faceInfo, int minSize, double* threshold, double factor);
private:
bool CvMatToDatumSignalChannel(const cv::Mat& cv_mat, Datum* datum);
//void Preprocess(const cv::Mat& img,
// std::vector<cv::Mat>* input_channels);
void WrapInputLayer(std::vector<cv::Mat>* input_channels, Blob<float>* input_layer,
const int height, const int width);
//void SetMean();
void GenerateBoundingBox(Blob<float>* confidence, Blob<float>* reg,
float scale, float thresh, int image_width, int image_height);
void ClassifyFace_MulImage(const std::vector<FaceInfo> ®ressed_rects, cv::Mat &sample_single,
boost::shared_ptr<Net<float> >& net, double thresh, char netName);
std::vector<FaceInfo> NonMaximumSuppression(std::vector<FaceInfo>& bboxes, float thresh, char methodType);
void Bbox2Square(std::vector<FaceInfo>& bboxes);
void Padding(int img_w, int img_h);
std::vector<FaceInfo> BoxRegress(std::vector<FaceInfo> &faceInfo_, int stage);
//void RegressPoint(const std::vector<FaceInfo>& faceInfo);
private:
boost::shared_ptr<Net<float> > PNet_;
boost::shared_ptr<Net<float> > RNet_;
boost::shared_ptr<Net<float> > ONet_;
// x1,y1,x2,t2 and score
std::vector<FaceInfo> condidate_rects_;
std::vector<FaceInfo> total_boxes_;
std::vector<FaceInfo> regressed_rects_;
std::vector<FaceInfo> regressed_pading_;
std::vector<cv::Mat> crop_img_;
int curr_feature_map_w_;
int curr_feature_map_h_;
int num_channels_;
};
// compare score
bool CompareBBox(const FaceInfo & a, const FaceInfo & b) {
return a.bbox.score > b.bbox.score;
}
// methodType : u is IoU(Intersection Over Union)
// methodType : m is IoM(Intersection Over Maximum)
std::vector<FaceInfo> MTCNN::NonMaximumSuppression(std::vector<FaceInfo>& bboxes,
float thresh, char methodType) {
std::vector<FaceInfo> bboxes_nms;
std::sort(bboxes.begin(), bboxes.end(), CompareBBox);
int32_t select_idx = 0;
int32_t num_bbox = static_cast<int32_t>(bboxes.size());
std::vector<int32_t> mask_merged(num_bbox, 0);
bool all_merged = false;
while (!all_merged) {
while (select_idx < num_bbox && mask_merged[select_idx] == 1)
select_idx++;
if (select_idx == num_bbox) {
all_merged = true;
continue;
}
bboxes_nms.push_back(bboxes[select_idx]);
mask_merged[select_idx] = 1;
FaceRect select_bbox = bboxes[select_idx].bbox;
float area1 = static_cast<float>((select_bbox.x2 - select_bbox.x1 + 1) * (select_bbox.y2 - select_bbox.y1 + 1));
float x1 = static_cast<float>(select_bbox.x1);
float y1 = static_cast<float>(select_bbox.y1);
float x2 = static_cast<float>(select_bbox.x2);
float y2 = static_cast<float>(select_bbox.y2);
select_idx++;
for (int32_t i = select_idx; i < num_bbox; i++) {
if (mask_merged[i] == 1)
continue;
FaceRect& bbox_i = bboxes[i].bbox;
float x = std::max<float>(x1, static_cast<float>(bbox_i.x1));
float y = std::max<float>(y1, static_cast<float>(bbox_i.y1));
float w = std::min<float>(x2, static_cast<float>(bbox_i.x2)) - x + 1;
float h = std::min<float>(y2, static_cast<float>(bbox_i.y2)) - y + 1;
if (w <= 0 || h <= 0)
continue;
float area2 = static_cast<float>((bbox_i.x2 - bbox_i.x1 + 1) * (bbox_i.y2 - bbox_i.y1 + 1));
float area_intersect = w * h;
switch (methodType) {
case 'u':
if (static_cast<float>(area_intersect) / (area1 + area2 - area_intersect) > thresh)
mask_merged[i] = 1;
break;
case 'm':
if (static_cast<float>(area_intersect) / min(area1, area2) > thresh)
mask_merged[i] = 1;
break;
default:
break;
}
}
}
return bboxes_nms;
}
void MTCNN::Bbox2Square(std::vector<FaceInfo>& bboxes) {
for (int i = 0; i < bboxes.size(); i++) {
float h = bboxes[i].bbox.x2 - bboxes[i].bbox.x1;
float w = bboxes[i].bbox.y2 - bboxes[i].bbox.y1;
float side = h > w ? h : w;
bboxes[i].bbox.x1 += (h - side)*0.5;
bboxes[i].bbox.y1 += (w - side)*0.5;
bboxes[i].bbox.x2 = (int)(bboxes[i].bbox.x1 + side);
bboxes[i].bbox.y2 = (int)(bboxes[i].bbox.y1 + side);
bboxes[i].bbox.x1 = (int)(bboxes[i].bbox.x1);
bboxes[i].bbox.y1 = (int)(bboxes[i].bbox.y1);
}
}
std::vector<FaceInfo> MTCNN::BoxRegress(std::vector<FaceInfo>& faceInfo, int stage) {
std::vector<FaceInfo> bboxes;
for (int bboxId = 0; bboxId < faceInfo.size(); bboxId++) {
FaceRect faceRect;
FaceInfo tempFaceInfo;
float regw = faceInfo[bboxId].bbox.y2 - faceInfo[bboxId].bbox.y1;
regw += (stage == 1) ? 0 : 1;
float regh = faceInfo[bboxId].bbox.x2 - faceInfo[bboxId].bbox.x1;
regh += (stage == 1) ? 0 : 1;
faceRect.y1 = faceInfo[bboxId].bbox.y1 + regw * faceInfo[bboxId].regression[0];
faceRect.x1 = faceInfo[bboxId].bbox.x1 + regh * faceInfo[bboxId].regression[1];
faceRect.y2 = faceInfo[bboxId].bbox.y2 + regw * faceInfo[bboxId].regression[2];
faceRect.x2 = faceInfo[bboxId].bbox.x2 + regh * faceInfo[bboxId].regression[3];
faceRect.score = faceInfo[bboxId].bbox.score;
tempFaceInfo.bbox = faceRect;
tempFaceInfo.regression = faceInfo[bboxId].regression;
if (stage == 3)
tempFaceInfo.facePts = faceInfo[bboxId].facePts;
bboxes.push_back(tempFaceInfo);
}
return bboxes;
}
// compute the padding coordinates (pad the bounding boxes to square)
void MTCNN::Padding(int img_w, int img_h) {
for (int i = 0; i < regressed_rects_.size(); i++) {
FaceInfo tempFaceInfo;
tempFaceInfo = regressed_rects_[i];
tempFaceInfo.bbox.y2 = (regressed_rects_[i].bbox.y2 >= img_w) ? img_w : regressed_rects_[i].bbox.y2;
tempFaceInfo.bbox.x2 = (regressed_rects_[i].bbox.x2 >= img_h) ? img_h : regressed_rects_[i].bbox.x2;
tempFaceInfo.bbox.y1 = (regressed_rects_[i].bbox.y1 < 1) ? 1 : regressed_rects_[i].bbox.y1;
tempFaceInfo.bbox.x1 = (regressed_rects_[i].bbox.x1 < 1) ? 1 : regressed_rects_[i].bbox.x1;
regressed_pading_.push_back(tempFaceInfo);
}
}
void MTCNN::GenerateBoundingBox(Blob<float>* confidence, Blob<float>* reg,
float scale, float thresh, int image_width, int image_height) {
int stride = 2;
int cellSize = 12;
int curr_feature_map_w_ = std::ceil((image_width - cellSize)*1.0 / stride) + 1;
int curr_feature_map_h_ = std::ceil((image_height - cellSize)*1.0 / stride) + 1;
//std::cout << "Feature_map_size:"<< curr_feature_map_w_ <<" "<<curr_feature_map_h_<<std::endl;
int regOffset = curr_feature_map_w_*curr_feature_map_h_;
// the first count numbers are confidence of face
int count = confidence->count() / 2;
const float* confidence_data = confidence->cpu_data();
confidence_data += count;
const float* reg_data = reg->cpu_data();
condidate_rects_.clear();
for (int i = 0; i < count; i++) {
if (*(confidence_data + i) >= thresh) {
int y = i / curr_feature_map_w_;
int x = i - curr_feature_map_w_ * y;
float xTop = (int)((x*stride + 1) / scale);
float yTop = (int)((y*stride + 1) / scale);
float xBot = (int)((x*stride + cellSize - 1 + 1) / scale);
float yBot = (int)((y*stride + cellSize - 1 + 1) / scale);
FaceRect faceRect;
faceRect.x1 = xTop;
faceRect.y1 = yTop;
faceRect.x2 = xBot;
faceRect.y2 = yBot;
faceRect.score = *(confidence_data + i);
FaceInfo faceInfo;
faceInfo.bbox = faceRect;
faceInfo.regression = cv::Vec4f(reg_data[i + 0 * regOffset], reg_data[i + 1 * regOffset], reg_data[i + 2 * regOffset], reg_data[i + 3 * regOffset]);
condidate_rects_.push_back(faceInfo);
}
}
}
MTCNN::MTCNN(const std::string &proto_model_dir) {
#ifdef CPU_ONLY
Caffe::set_mode(Caffe::CPU);
#else
Caffe::set_mode(Caffe::GPU);
#endif
/* Load the network. */
PNet_.reset(new Net<float>((proto_model_dir + "/det1.prototxt"), TEST));
PNet_->CopyTrainedLayersFrom(proto_model_dir + "/det1.caffemodel");
CHECK_EQ(PNet_->num_inputs(), 1) << "Network should have exactly one input.";
CHECK_EQ(PNet_->num_outputs(), 2) << "Network should have exactly two output, one"" is bbox and another is confidence.";
//RNet_.reset(new Net<float>((proto_model_dir+"/det2.prototxt"), TEST));
RNet_.reset(new Net<float>((proto_model_dir + "/det2_input.prototxt"), TEST));
RNet_->CopyTrainedLayersFrom(proto_model_dir + "/det2.caffemodel");
// CHECK_EQ(RNet_->num_inputs(), 0) << "Network should have exactly one input.";
// CHECK_EQ(RNet_->num_outputs(),3) << "Network should have exactly two output, one"
// " is bbox and another is confidence.";
ONet_.reset(new Net<float>((proto_model_dir + "/det3_input.prototxt"), TEST));
ONet_->CopyTrainedLayersFrom(proto_model_dir + "/det3.caffemodel");
// CHECK_EQ(ONet_->num_inputs(), 1) << "Network should have exactly one input.";
// CHECK_EQ(ONet_->num_outputs(),3) << "Network should have exactly three output, one"
// " is bbox and another is confidence.";
Blob<float>* input_layer;
input_layer = PNet_->input_blobs()[0];
num_channels_ = input_layer->channels();
CHECK(num_channels_ == 3 || num_channels_ == 1) << "Input layer should have 1 or 3 channels.";
}
void MTCNN::WrapInputLayer(std::vector<cv::Mat>* input_channels,
Blob<float>* input_layer, const int height, const int width) {
float* input_data = input_layer->mutable_cpu_data();
for (int i = 0; i < input_layer->channels(); ++i) {
cv::Mat channel(height, width, CV_32FC1, input_data);
input_channels->push_back(channel);
input_data += width * height;
}
}
// multi test image pass a forward
void MTCNN::ClassifyFace_MulImage(const std::vector<FaceInfo>& regressed_rects, cv::Mat &sample_single,
boost::shared_ptr<Net<float> >& net, double thresh, char netName) {
condidate_rects_.clear();
int numBox = regressed_rects.size();
std::vector<Datum> datum_vector;
boost::shared_ptr<MemoryDataLayer<float> > mem_data_layer;
mem_data_layer = boost::static_pointer_cast<MemoryDataLayer<float>>(net->layers()[0]);
int input_width = mem_data_layer->width();
int input_height = mem_data_layer->height();
// load crop_img data to datum
for (int i = 0; i < numBox; i++) {
int pad_top = std::abs(regressed_pading_[i].bbox.x1 - regressed_rects[i].bbox.x1);
int pad_left = std::abs(regressed_pading_[i].bbox.y1 - regressed_rects[i].bbox.y1);
int pad_right = std::abs(regressed_pading_[i].bbox.y2 - regressed_rects[i].bbox.y2);
int pad_bottom = std::abs(regressed_pading_[i].bbox.x2 - regressed_rects[i].bbox.x2);
cv::Mat crop_img = sample_single(cv::Range(regressed_pading_[i].bbox.y1 - 1, regressed_pading_[i].bbox.y2),
cv::Range(regressed_pading_[i].bbox.x1 - 1, regressed_pading_[i].bbox.x2));
cv::copyMakeBorder(crop_img, crop_img, pad_left, pad_right, pad_top, pad_bottom, cv::BORDER_CONSTANT, cv::Scalar(0));
cv::resize(crop_img, crop_img, cv::Size(input_width, input_height), 0, 0, cv::INTER_AREA);
crop_img = (crop_img - 127.5)*0.0078125;
Datum datum;
CvMatToDatumSignalChannel(crop_img, &datum);
datum_vector.push_back(datum);
}
regressed_pading_.clear();
/* extract the features and store */
mem_data_layer->set_batch_size(numBox);
mem_data_layer->AddDatumVector(datum_vector);
/* fire the network */
float no_use_loss = 0;
net->Forward(&no_use_loss);
// CHECK(reinterpret_cast<float*>(crop_img_set.at(0).data) == net->input_blobs()[0]->cpu_data())
// << "Input channels are not wrapping the input layer of the network.";
// return RNet/ONet result
std::string outPutLayerName = (netName == 'r' ? "conv5-2" : "conv6-2");
std::string pointsLayerName = "conv6-3";
const boost::shared_ptr<Blob<float> > reg = net->blob_by_name(outPutLayerName);
const boost::shared_ptr<Blob<float> > confidence = net->blob_by_name("prob1");
// ONet points_offset != NULL
const boost::shared_ptr<Blob<float> > points_offset = net->blob_by_name(pointsLayerName);
const float* confidence_data = confidence->cpu_data();
const float* reg_data = reg->cpu_data();
for (int i = 0; i<numBox; i++) {
if (*(confidence_data + i * 2 + 1) > thresh) {
FaceRect faceRect;
faceRect.x1 = regressed_rects[i].bbox.x1;
faceRect.y1 = regressed_rects[i].bbox.y1;
faceRect.x2 = regressed_rects[i].bbox.x2;
faceRect.y2 = regressed_rects[i].bbox.y2;
faceRect.score = *(confidence_data + i * 2 + 1);
FaceInfo faceInfo;
faceInfo.bbox = faceRect;
faceInfo.regression = cv::Vec4f(reg_data[4 * i + 0], reg_data[4 * i + 1], reg_data[4 * i + 2], reg_data[4 * i + 3]);
// x x x x x y y y y y
if (netName == 'o') {
FacePts face_pts;
const float* points_data = points_offset->cpu_data();
float w = faceRect.y2 - faceRect.y1 + 1;
float h = faceRect.x2 - faceRect.x1 + 1;
for (int j = 0; j < 5; j++) {
face_pts.y[j] = faceRect.y1 + *(points_data + j + 10 * i) * h - 1;
face_pts.x[j] = faceRect.x1 + *(points_data + j + 5 + 10 * i) * w - 1;
}
faceInfo.facePts = face_pts;
}
condidate_rects_.push_back(faceInfo);
}
}
}
bool MTCNN::CvMatToDatumSignalChannel(const cv::Mat& cv_mat, Datum* datum) {
if (cv_mat.empty())
return false;
int channels = cv_mat.channels();
datum->set_channels(cv_mat.channels());
datum->set_height(cv_mat.rows);
datum->set_width(cv_mat.cols);
datum->set_label(0);
datum->clear_data();
datum->clear_float_data();
datum->set_encoded(false);
int datum_height = datum->height();
int datum_width = datum->width();
if (channels == 3) {
for (int c = 0; c < channels; c++) {
for (int h = 0; h < datum_height; ++h) {
for (int w = 0; w < datum_width; ++w) {
const float* ptr = cv_mat.ptr<float>(h);
datum->add_float_data(ptr[w*channels + c]);
}
}
}
}
return true;
}
void MTCNN::Detect(const cv::Mat& image, std::vector<FaceInfo>& faceInfo, int minSize, double* threshold, double factor) {
// 2~3ms
// invert to RGB color space and float type
cv::Mat sample_single, resized;
image.convertTo(sample_single, CV_32FC3);
cv::cvtColor(sample_single, sample_single, cv::COLOR_BGR2RGB);
sample_single = sample_single.t();
int height = image.rows;
int width = image.cols;
int minWH = min(height, width);
int factor_count = 0;
double m = 12. / minSize;
minWH *= m;
std::vector<double> scales;
while (minWH >= 12)
{
scales.push_back(m * std::pow(factor, factor_count));
minWH *= factor;
++factor_count;
}
// 11ms main consum
Blob<float>* input_layer = PNet_->input_blobs()[0];
for (int i = 0; i < factor_count; i++)
{
double scale = scales[i];
int ws = std::ceil(height*scale);
int hs = std::ceil(width*scale);
// wrap image and normalization using INTER_AREA method
cv::resize(sample_single, resized, cv::Size(ws, hs), 0, 0, cv::INTER_AREA);
resized.convertTo(resized, CV_32FC3, 0.0078125, -127.5*0.0078125);
// input data
input_layer->Reshape(1, 3, hs, ws);
PNet_->Reshape();
std::vector<cv::Mat> input_channels;
WrapInputLayer(&input_channels, PNet_->input_blobs()[0], hs, ws);
cv::split(resized, input_channels);
// check data transform right
CHECK(reinterpret_cast<float*>(input_channels.at(0).data) == PNet_->input_blobs()[0]->cpu_data())<< "Input channels are not wrapping the input layer of the network.";
PNet_->Forward();
// return result
Blob<float>* reg = PNet_->output_blobs()[0];
//const float* reg_data = reg->cpu_data();
Blob<float>* confidence = PNet_->output_blobs()[1];
GenerateBoundingBox(confidence, reg, scale, threshold[0], ws, hs);
std::vector<FaceInfo> bboxes_nms = NonMaximumSuppression(condidate_rects_, 0.5, 'u');
total_boxes_.insert(total_boxes_.end(), bboxes_nms.begin(), bboxes_nms.end());
}
int numBox = total_boxes_.size();
if (numBox != 0) {
total_boxes_ = NonMaximumSuppression(total_boxes_, 0.7, 'u');
regressed_rects_ = BoxRegress(total_boxes_, 1);
total_boxes_.clear();
Bbox2Square(regressed_rects_);
Padding(width, height);
/// Second stage
ClassifyFace_MulImage(regressed_rects_, sample_single, RNet_, threshold[1], 'r');
condidate_rects_ = NonMaximumSuppression(condidate_rects_, 0.7, 'u');
regressed_rects_ = BoxRegress(condidate_rects_, 2);
Bbox2Square(regressed_rects_);
Padding(width, height);
/// three stage
numBox = regressed_rects_.size();
if (numBox != 0) {
ClassifyFace_MulImage(regressed_rects_, sample_single, ONet_, threshold[2], 'o');
regressed_rects_ = BoxRegress(condidate_rects_, 3);
faceInfo = NonMaximumSuppression(regressed_rects_, 0.7, 'm');
}
}
regressed_pading_.clear();
regressed_rects_.clear();
condidate_rects_.clear();
}
int main(int argc, char **argv)
{
::google::InitGoogleLogging(argv[0]);
double threshold[3] = { 0.6, 0.7, 0.5 };
double factor = 0.709;
int minSize = 50;
string proto_model_dir = "model";
MTCNN detector(proto_model_dir);
#if FROM_VIDEO
cv::VideoCapture cap(0);
#else
string imgname = "test.jpg";
#endif
cv::Mat frame;
#if FROM_VIDEO
while (cap.read(frame)) {
#else
string imageName = imgname;
frame = cv::imread(imageName);
#endif
clock_t t1 = clock();
std::vector<FaceInfo> faceInfo;
detector.Detect(frame, faceInfo, minSize, threshold, factor);
std::cout << "Detect " << frame.rows << "X" << frame.cols << " Time Using GPU-CUDNN: " << (clock() - t1)*1.0 / 1000 << std::endl;
for (int i = 0; i < faceInfo.size(); i++) {
float x = faceInfo[i].bbox.x1;
float y = faceInfo[i].bbox.y1;
float h = faceInfo[i].bbox.x2 - faceInfo[i].bbox.x1 + 1;
float w = faceInfo[i].bbox.y2 - faceInfo[i].bbox.y1 + 1;
cv::rectangle(frame, cv::Rect(y, x, w, h), cv::Scalar(255, 0, 0), 2);
}
for (int i = 0; i < faceInfo.size(); i++) {
FacePts facePts = faceInfo[i].facePts;
for (int j = 0; j < 5; j++)
cv::circle(frame, cv::Point(facePts.y[j], facePts.x[j]), 3, cv::Scalar(0, 0, 255), 3);
}
cv::imshow("img", frame);
#if FROM_VIDEO
if ((char)cv::waitKey(1) == 'q')
break;
}
#else
string resultpath = resultdir + "/" + imgname;
cv::imwrite(resultpath, frame);
cv::waitKey();
#endif
return 0;
}
